
LA ROBOTICA CONOSCE OGGI UNA CRESCITA STRAORDINARIA e non è fantascienza pensare che tra qualche anno i robot saranno indispensabili alla nostra società, non senza problematiche (un argomento già affrontato nel numero 195 di D’Ars dedicato alla “terza vita”). Chi lavora con la robotica, anche in campo artistico, oggi è sempre più spesso spinto a interrogarsi sul proprio ruolo ed entro quali limiti estendere il proprio campo d’azione. Il problema è poi anche sociale o etico, l’arte sempre più bio-tech, è cerbero “ibrido” composto da bios, technology e technè. Non stupisce dunque che molti artisti in tutto il mondo abbiano posto al centro del loro operare l’evoluzione di questa disciplina, cimentandosi anche con gli strumenti robotici.
Per questi motivi di stretta attualità, la Fondazione D’Ars – Oscar Signorini onlus ha deciso quest’anno di dedicare, per la prima volta in Italia, l’annuale Premio Oscar Signorini (istituito nel 1984 in memoria del fondatore di D’Ars) all’arte robotica. Il Premio ha avuto spesso una dimensione anticipatrice, come per esempio nel caso della net art (1998) e della bioarte (2005).
Il compito dei giurati quest’anno non è stato semplice. Ogni giurato doveva indicare due artisti con meno di 35 anni operanti nel campo dell’arte robotica. Le difficoltà maggiori probabilmente sono anche dovute al fatto che le competenze interdisciplinari, teoriche, tecniche, tecnologiche e scientifiche necessarie a operare in un ambito di eccellenza in questo settore richiedono un iter più lungo rispetto ad altre forme artistiche.
Questa difficoltà si acuisce per quanto riguarda il nostro Paese: nessun artista italiano under 35 figura tra le segnalazioni della Giuria nonostante fosse in maggioranza composta da italiani. In Italia nel settore della robotica esistono scuole di eccellenza a livello internazionale (uno dei primi tre prescelti si sta specializzando proprio nel nostro Paese), sono nate correnti di pensiero (come la roboetica), e a livello industriale l’Italia si colloca tra le prime nazioni europee.
La selezione della Giuria, presieduta da Pier Luigi Capucci e composta da Eduardo Kac, Riccardo Notte, Luigi Pagliarini, Pavel Smetana, Franco Torriani e la sottoscritta, ha comunque mostrato un panorama internazionale articolato e vario, che va dalla robotica più tradizionale alle commistioni con la biologia, con la realtà aumentata, con l’arte cinetica, dalle relazioni uomo-macchina e animale-macchina alle interazioni tra dispositivi e ambiente, alla dimensione sociale della robotica.
I tre progetti selezionati sono stati Cockroach Controlled Mobile Robot, di Garnet Hertz, The Ultimate Aesthetic Experience, di Haakon Faste e EX-SE-08, di Shih Chieh Huang.
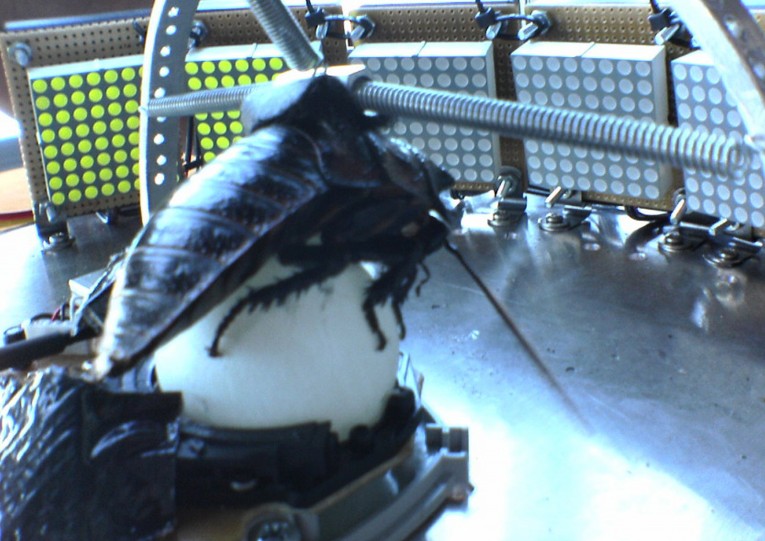
L’opera che alla fine è risultata vincitrice è Cockroach Controlled Mobile Robot (http://conceptlab.com/roachbot). Come spiega lo stesso artista: «This is an experimental mechanism that uses a living Madagascan hissing cockroach atop a modified trackball to control a three-wheeled robot. If the cockroach moves left, the robot moves left. Infrared sensors also provide navigation feedback to the cockroach, striving to create a pseudo-intelligent system with the cockroach as the Cpu».
L’oggetto a cui ruota attorno la ricerca di Hertz è cioè un innesto biorobotico: il suo nome scientifico è Gromphadorhina portentosa, proviene dal Madagascar ed è uno scarafaggio gigante. Lungo fino a 8 centimetri, si muove lentamente. Hertz, ricercatore alla University of California, riprogramma la vita di una esotica blatta dotandola di una estensione robotica. È forse il primo insetto cyborg della storia, nato da un interessante percorso di ricerca intitolato “Controllo e comunicazione nell’animale e nella macchina”.
Uno degli obiettivi di questi studi è dimostrare che la robotica contemporanea e gli animali siano più simili di quanto si sia pensato fino ad oggi. Hertz sostiene per esempio che molti robot, per muoversi su terreni accidentati «emulano il modello comportamentale dello scarafaggio, in grado di adattarsi velocemente all’ambiente».
E il colpo di genio che ha portato alla cyberblatta nasce proprio qui: cosa accade se uno scarafaggio si mette letteralmente alla guida di una macchina? Hertz ha così costruito un carrello robot dotato di un insolito sistema di controllo automatico: al posto di un cervello elettronico, l’intelligenza della macchina è uno scarafaggio del Madagascar.
Posizionato sopra un trackball modificato, l’insetto è circondato da una serie di diodi. Muovendosi con le zampette sopra la pallina, lo scarafaggio fa spostare il carrello: in caso di collisione, appositi sensori fanno illuminare il diodo corrispondente. Immediatamente, l’animaletto sgambetta nella direzione opposta, fuggendo dalla luce. Infatti gli scarafaggi sono notoriamente “allergici” ad ogni tipo di fonte luminosa.

Il cyberscarafaggio sembra adattarsi all’ambiente circostante, proprio come se le ruote, il metallo ed il silicio del carrello automatico ne fossero diventate parte integrante. L’ambizione di Hertz è favorire la riflessione sullo scontro tra natura e tecnologia. Di certo, rimane qualche interrogativo sui diritti degli animali.
Mossa da un principio darwiniano, dal desiderio di esplorare l’adattamento all’evoluzione “inusuale”, è l’opera, EX-SE-08 di Shih Chieh Huang (http://messymix.com), terza classificata per la «dimensione suggestiva, la sensibilità spazioambientale del lavoro e per l’idea di una robotica ‘popolare’». L’idea è quella di un ready made robotico, o meglio di un “rinnovato” ecosistema creato per accumulazione, animato da oggetti di uso quotidiano attraverso l’intervento dell’artista giapponese.
Infine, The Ultimate Aesthetic Experience di Haakon Faste (htttp://www.haakonfaste.com) si basa su un ambizioso presupposto teorico suggerendo un’originale visione della robotica. Per Faste, non lontano da quanto scriveva McLuhan, «i robot sono estensione dell’attività umana, protesi extraorganiche».
La sua opera, ad alto impatto, prevede un’immersione totale dello spettatore. Essa integra diverse interfacce tecnologiche, dal proiettore stereoscopico alla grafica tridimensionale, all’interazione robotica. Lo scopo è proprio quello di esplorare i possibili comportamenti e le relazioni dello spettatore alla “piattaforma tecnologica”, quando si trova al massimo del suo potenziale emotivo. La sua complessità crea un’interazione tra il robot-macchina e l’utente, attraverso un’ultima, magica, totalizzante e meravigliosa esperienza estetica.
Laura Sansavini



